Introdução aos sistemas de controle
1.1 | Introdução.
1.2 | Exemplos de sistemas de controle.
1.3 | Controle de malha fechada versus controle de malha aberta.
1.4 | Projeto e compensação de sistemas de controle.
1.1 | Introdução
As teorias de controle comumente usadas hoje são a teoria de controle clássico (também chamada de teoria de controle convencional), a teoria de controle moderno e a teoria de controle robusto.
O controle automático é essencial em qualquer campo da engenharia e da ciência. O controle
automático é um componente importante e intrínseco em sistemas de veículos espaciais, sistemas
robóticos, modernos sistemas de manufatura e quaisquer operações industriais que envolvam o
controle de temperatura, pressão, umidade, viscosidade, vazão etc. É desejável que a maioria
dos engenheiros e cientistas esteja familiarizada com a teoria e a prática do controle automático.
Terminologia básica
Variável controlada e sinal de controle ou variável manipulada - variável controlada é
a grandeza ou a condição que é medida e controlada. O sinal de controle ou variável manipulada
é a grandeza ou a condição modificada pelo controlador, de modo que afete o valor da variável
controlada. Normalmente, a variável controlada é a saída do sistema. Controlar significa medir
o valor da variável controlada do sistema e aplicar o sinal de controle ao sistema para corrigir ou
limitar os desvios do valor medido a partir de um valor desejado.
Planta - uma planta pode ser uma parte de equipamento ou apenas um conjunto de componentes
de um equipamento que funcione de maneira integrada, com o objetivo de realizar determinada
operação, podemos denominar planta qualquer objeto físico a ser controlado (como um
componente mecânico, um forno, um reator químico ou uma espaçonave).
Processos - O dicionário Merriam-Webster define um processo como uma operação natural de
progresso contínuo ou um desenvolvimento caracterizado por uma série de modificações graduais
que se sucedem umas às outras de modo relativamente estável, avançando em direção a dado
resultado ou objetivo, ou uma operação contínua progressiva, artificial ou voluntária, que consiste
em uma série de ações ou movimentos controlados, sistematicamente destinados a atingir determinados fins ou resultados. Processo é toda operação a ser controlada.
Entre os exemplos estão os processos químicos, econômicos e biológicos.
Sistemas - um sistema é a combinação de componentes que agem em conjunto para atingir determinado objetivo.A ideia de sistema não fica restrita apenas a algo físico. O conceito sistema pode ser aplicado a fenômenos abstratos dinâmicos, como aqueles encontrados na economia. Dessa
a grandeza ou a condição que é medida e controlada. O sinal de controle ou variável manipulada
é a grandeza ou a condição modificada pelo controlador, de modo que afete o valor da variável
controlada. Normalmente, a variável controlada é a saída do sistema. Controlar significa medir
o valor da variável controlada do sistema e aplicar o sinal de controle ao sistema para corrigir ou
limitar os desvios do valor medido a partir de um valor desejado.
Planta - uma planta pode ser uma parte de equipamento ou apenas um conjunto de componentes
de um equipamento que funcione de maneira integrada, com o objetivo de realizar determinada
operação, podemos denominar planta qualquer objeto físico a ser controlado (como um
componente mecânico, um forno, um reator químico ou uma espaçonave).
Processos - O dicionário Merriam-Webster define um processo como uma operação natural de
progresso contínuo ou um desenvolvimento caracterizado por uma série de modificações graduais
que se sucedem umas às outras de modo relativamente estável, avançando em direção a dado
resultado ou objetivo, ou uma operação contínua progressiva, artificial ou voluntária, que consiste
em uma série de ações ou movimentos controlados, sistematicamente destinados a atingir determinados fins ou resultados. Processo é toda operação a ser controlada.
Entre os exemplos estão os processos químicos, econômicos e biológicos.
Sistemas - um sistema é a combinação de componentes que agem em conjunto para atingir determinado objetivo.A ideia de sistema não fica restrita apenas a algo físico. O conceito sistema pode ser aplicado a fenômenos abstratos dinâmicos, como aqueles encontrados na economia. Dessa
maneira, a palavra ‘sistema’ pode ser empregada para se referir a sistemas físicos, biológicos,
econômicos e outros.
Distúrbios - um distúrbio é um sinal que tende a afetar de maneira adversa o valor da variável de
saída de um sistema. Se um distúrbio for gerado dentro de um sistema, ele será chamado distúrbio
interno, enquanto um distúrbio externo é aquele gerado fora do sistema e que se comporta como
um sinal de entrada no sistema.
Controle com realimentação - controle com realimentação refere-se a uma operação que, na
presença de distúrbios, tende a diminuir a diferença entre a saída de um sistema e alguma entrada de referência e atua com base nessa diferença. Aqui, serão considerados apenas distúrbios não
previsíveis, uma vez que distúrbios conhecidos ou previsíveis sempre podem ser compensados
no sistema.
1.2 | Exemplos de sistemas de controle
Sistema de controle de velocidade - O princípio básico de um regulador Watt de velocidade
para um motor está ilustrado no diagrama esquemático da Figura 1.1. A quantidade de combustível
fornecida ao motor é ajustada de acordo com a diferença entre a velocidade esperada e a
velocidade efetiva do motor.
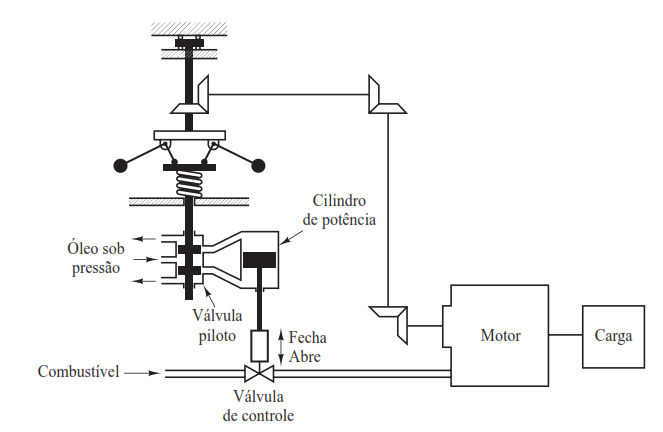 |
| Figura 1.1 - Sistema de Controle de Velocidade |
A sequência de ações pode ser estabelecida da seguinte maneira: o regulador de velocidade
é ajustado de modo que, à velocidade desejada, não haja fluxo de óleo sob pressão em ambos os
lados do interior do cilindro de potência. Se a velocidade real cai abaixo do valor desejado, em
decorrência de um distúrbio, então a diminuição na força centrífuga do regulador de velocidade
faz que a válvula de controle se mova para baixo, fornecendo mais combustível, e a
velocidade do motor aumente até atingir o valor desejado. Por outro lado, se a velocidade do
motor aumenta acima do valor desejado, então o aumento na força centrífuga do regulador de
velocidade faz que a válvula de controle se desloque para cima. Isso diminui o suprimento de
combustível, e a velocidade do motor é reduzida até atingir o valor esperado.
Nesse sistema de controle de velocidade, a planta (sistema controlado) é o motor e a variável
controlada é a velocidade do eixo do motor. A diferença entre a velocidade desejada e a velocidade
real é o sinal de erro. O sinal de controle (a quantidade de combustível) a ser aplicado à planta
(motor) é o sinal atuante. A grandeza externa que perturba a variável controlada é o distúrbio.
Uma mudança inesperada na carga é um distúrbio.
Sistema de controle de temperatura - A Figura 1.2 mostra um diagrama esquemático de
controle de temperatura de um forno elétrico. A temperatura do forno elétrico é medida por um termômetro, que é um dispositivo analógico. O sinal analógico de temperatura é convertido em
um sinal digital por um conversor A/D (analógico-digital). O sinal digital obtido é fornecido
ao controlador por meio de uma interface. Esse sinal digital é comparado com a temperatura
programada de referência e, se houver alguma divergência (erro), o controlador envia um sinal
ao aquecedor, por meio de uma interface, um amplificador e um relé, fazendo que a temperatura
do forno atinja o valor desejado.
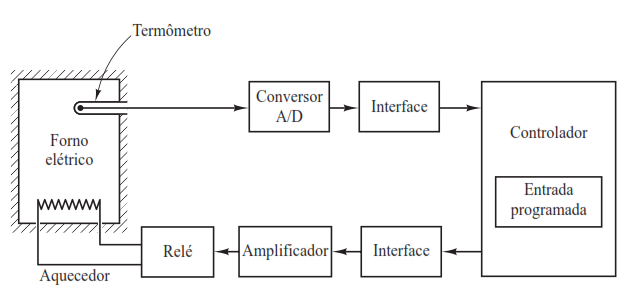 |
| Figura 1.2 - Sistema de Controle de Temperatura |
1.3 | Controle de malha fechada versus controle de malha aberta
Sistemas de controle com realimentação. Um sistema que estabeleça uma relação de comparação
entre a saída e a entrada de referência, utilizando a diferença como meio de controle, é
denominado sistema de controle com realimentação. Um exemplo poderia ser o sistema de controle
de temperatura de um ambiente. Medindo-se a temperatura ambiente real e comparando-a com a temperatura de referência (temperatura desejada), o termostato ativa ou desativa o equipamento
de aquecimento ou resfriamento, de modo que assegure que a temperatura ambiente permaneça
em um nível confortável, independentemente das condições exteriores.
Os sistemas de controle com realimentação não estão limitados à engenharia, podendo ser
encontrados em várias outras áreas. O corpo humano, por exemplo, é um sistema de controle com realimentação extremamente desenvolvido. Tanto a temperatura corporal como a pressão
sanguínea são mantidas constantes por meio da realimentação de ordem fisiológica. Nesse caso,
a realimentação realiza uma função vital: faz que o corpo humano seja relativamente insensível
a perturbações externas, permitindo seu perfeito funcionamento nos casos de mudanças no ambiente.
Sistemas de controle de malha fechada - Os sistemas de controle com realimentação são,
com frequência, denominados também sistemas de controle de malha fechada. Na prática, os termos controle com realimentação e controle de malha fechada são usados indistintamente. Em
um sistema de controle de malha fechada, o sinal de erro atuante, que é a diferença entre o sinal
de entrada e o sinal de realimentação (que pode ser o próprio sinal de saída ou uma função do
sinal de saída e suas derivadas e/ou integrais), realimenta o controlador, de modo a minimizar o
erro e acertar a saída do sistema ao valor desejado. O termo ‘controle de malha fechada’ sempre
implica a utilização do controle com realimentação para reduzir o erro do sistema.
Sistemas de controle de malha aberta - Os chamados sistemas de controle de malha aberta
são aqueles em que o sinal de saída não exerce nenhuma ação de controle no sistema. Isso quer
dizer que, em um sistema de controle de malha aberta, o sinal de saída não é medido nem realimentado para comparação com a entrada. Um exemplo prático é o da máquina de lavar roupas.
As operações de colocar de molho, lavar e enxaguar em uma lavadora são executadas em uma
sequência baseada em tempo. A lavadora não mede o sinal de saída, isto é, não verifica se as
roupas estão bem lavadas.
Em qualquer sistema de controle de malha aberta, a saída não é comparada com a entrada
de referência. Assim, a cada entrada de referência corresponde uma condição fixa de operação.
Dessa maneira, a precisão do sistema depende de uma calibração. Na presença de distúrbios,
um sistema de controle de malha aberta não vai executar a tarefa desejada. Na prática, o sistema
de controle de malha aberta somente poderá ser utilizado se a relação entre a entrada e a saída
for conhecida e se não houver nenhum distúrbio interno ou externo. É claro que estes não são
sistemas de controle realimentados. Observe que qualquer sistema de controle cujas operações
são efetuadas em uma sequência baseada em tempo é um sistema de malha aberta. O controle
de tráfego por meio de sinais, operado em função do tempo, é outro exemplo de controle de
malha aberta.
Sistemas de controle de malha fechada versus de malha aberta - Uma vantagem do sistema tema de controle de malha fechada é o fato de que o uso da realimentação faz que a resposta do
sistema seja relativamente insensível a distúrbios externos e a variações internas nos parâmetros
do sistema. Dessa forma, é possível a utilização de componentes relativamente imprecisos e
baratos para obter o controle preciso de determinado sistema, ao passo que isso não é possível
nos sistemas de malha aberta.
Do ponto de vista da estabilidade, o sistema de controle de malha aberta é mais fácil de ser
construído, pelo fato de a estabilidade ser um problema menos significativo. Por outro lado, a
estabilidade constitui um problema importante nos sistemas de controle de malha fechada, que
podem apresentar uma tendência de correção de erros além do necessário, causando oscilações
de amplitude constante ou variável.
Deve ser enfatizado que, para sistemas nos quais as entradas são conhecidas com antecipação
e que são isentos de distúrbios, é conveniente o uso do controle de malha aberta. Sistemas de controle de malha fechada são mais vantajosos somente nos casos em que houver distúrbios e/ou
alterações não previsíveis nos componentes do sistema. Note que a potência de saída determina
parcialmente o custo, o peso e as dimensões de um sistema de controle. O número de componentes
utilizados em um sistema de controle de malha fechada é maior do que em um sistema correspondente de malha aberta. Assim, no sistema de controle de malha fechada, o custo e a potência são geralmente maiores.Visando à diminuição da potência necessária à operação de um sistema, deve-se optar pelo controle de malha aberta, sempre que possível. Uma combinação apropriada do controle de malha aberta e de malha fechada é normalmente mais econômica e apresentará um desempenho satisfatório do sistema como um todo.
Seguem as principais vantagens dos sistemas de controle de malha aberta:
São simples de ser construídos e têm fácil manutenção.
- Não apresentam problemas de estabilidade.
- São adequados quando existem dificuldades de medição da saída ou quando a medição precisa da saída não é economicamente possível. (Por exemplo, no caso da máquina de lavar roupas, seria bastante dispendiosa a instalação de um dispositivo para avaliar se as roupas foram bem lavadas.)
As principais desvantagens dos sistemas de controle de malha aberta são:
- Distúrbios e mudanças na calibração causam erros, e a saída pode apresentar diferenças em relação ao padrão desejado.
- Para que a saída mantenha a qualidade requerida, é necessária uma regulagem periódica.
1.4 | Projeto e compensação de sistemas de controle
Compensação é a modificação da dinâmica do sistema para satisfazer às especificações dadas.
No projeto real de um sistema de controle, a utilização de um compensador eletrônico,
pneumático ou hidráulico é uma questão que deve ser decidida em parte com base na natureza da planta a ser controlada. Por exemplo, se a planta a ser controlada inclui líquido inflamável, temos
de escolher componentes pneumáticos (tanto um compensador quanto um atuador) para evitar a possibilidade de faíscas. Se, no entanto, não há risco de incêndio, compensadores eletrônicos são
os mais usados. (Inclusive, muitas vezes transformamos sinais não elétricos em sinais elétricos
em virtude da simplicidade de transmissão, da maior precisão, maior confiabilidade, facilidade
de compensação e vantagens semelhantes.)
Especificações de desempenho - Sistemas de controle são projetados para realizar tarefas específicas. Os requisitos impostos no sistema de controle são geralmente explicitados como especificações de desempenho. As especificações podem ser dadas em termos de requisitos de resposta transitória (como máximo sobressinal e tempo de acomodação na resposta à entrada em degrau) e de requisitos em regime estacionário (como erro estacionário para uma entrada em rampa), ou podem ser dados em termos de resposta em frequência. As especificações de um sistema de controle devem ser dadas antes do início do processo de projeto.
Compensação do sistema - Ajustar o ganho é o primeiro passo no ajuste do sistema para um
desempenho satisfatório. No entanto, em muitos casos práticos, o ajuste do ganho, por si só, pode não proporcionar uma alteração no comportamento do sistema que atenda às especificações desejadas.
Como ocorre frequentemente, o aumento no valor do ganho melhora o comportamento em regime estacionário, mas resulta em estabilidade deficiente e até em instabilidade. Torna-se necessário,
então, reprojetar o sistema (modificando a estrutura ou incorporando dispositivos ou componentes adicionais), para alterar seu comportamento geral de modo que ele se comporte como desejado.Tal reprojeto ou acréscimo de um dispositivo adequado chama-se compensação.
Um dispositivo inserido no sistema com o propósito de satisfazer às especificações é denominado
compensador. Este compensa pelo desempenho deficiente do sistema original.
Procedimentos de projeto - No processo de projetar um sistema de controle, montamos um
modelo matemático do sistema de controle e ajustamos os parâmetros de um compensador. A parte do processo que mais consome tempo é a verificação do desempenho do sistema, por meio da análise
de cada ajuste dos parâmetros.
Uma vez que um modelo matemático satisfatório tenha sido obtido, o projetista deve construir
um protótipo e testar o sistema de malha aberta. Se houver garantia de estabilidade absoluta da malha fechada, o projetista fecha a malha e testa o desempenho do sistema de malha fechada resultante.
Devido aos efeitos negligenciados da carga entre os componentes, das não linearidades, dos parâmetros distribuídos e assim por diante, que não foram levados em consideração no projeto
original, o desempenho real do protótipo do sistema provavelmente será diferente das previsões
teóricas. Portanto, o primeiro projeto pode não satisfazer todos os requisitos de desempenho. O
projetista deve ajustar os parâmetros do sistema e modificar o protótipo até que o sistema atenda
às especificações. Ao fazer isso, ele deve analisar cada teste e os resultados da análise devem ser
incorporados ao teste seguinte. O projetista deve garantir que o sistema final atenda às de especificações de desempenho e seja, ao mesmo tempo, confiável e econômico.
Referências
Ogata, Katsuhiko
Engenharia de controle moderno / Katsuhiko Ogata ; tradutora Heloísa
Engenharia de controle moderno / Katsuhiko Ogata ; tradutora Heloísa
Coimbra de Souza ; revisor técnico Eduardo Aoun Tannuri. -- 5. ed.
-- São Paulo : Pearson Prentice Hall, 2010.
-- São Paulo : Pearson Prentice Hall, 2010.
Nenhum comentário:
Postar um comentário